Vignesh Rajmohan
ECE/Robotics @ CMU
Projects

Visibility Graph Convex Partitioning
Created a novel partitioning method for polygonal obstacle-filled 2D environments to speed up planning using Graphs of Convex Sets (GCS) by replacing the currently used IRIS partitioning method, allowing for real-time planning capabilities.
Access DeepnoteCopyCat
Developed unsupervised deep learning method in Pytorch for discovering and learning robot skills from unlabeled video demos of human behavior. Evaluated by tasking delta robot with imitating human demos.
Made with Mrinal Verghese for Learning for Manipulation by Oliver Kroemer
Access Paper1x1: Package Re-identification
Backed by PearVC startup, developed system to re-identify packages using multiple visual features: color histogram, contrastive encoding, and package dimensions.
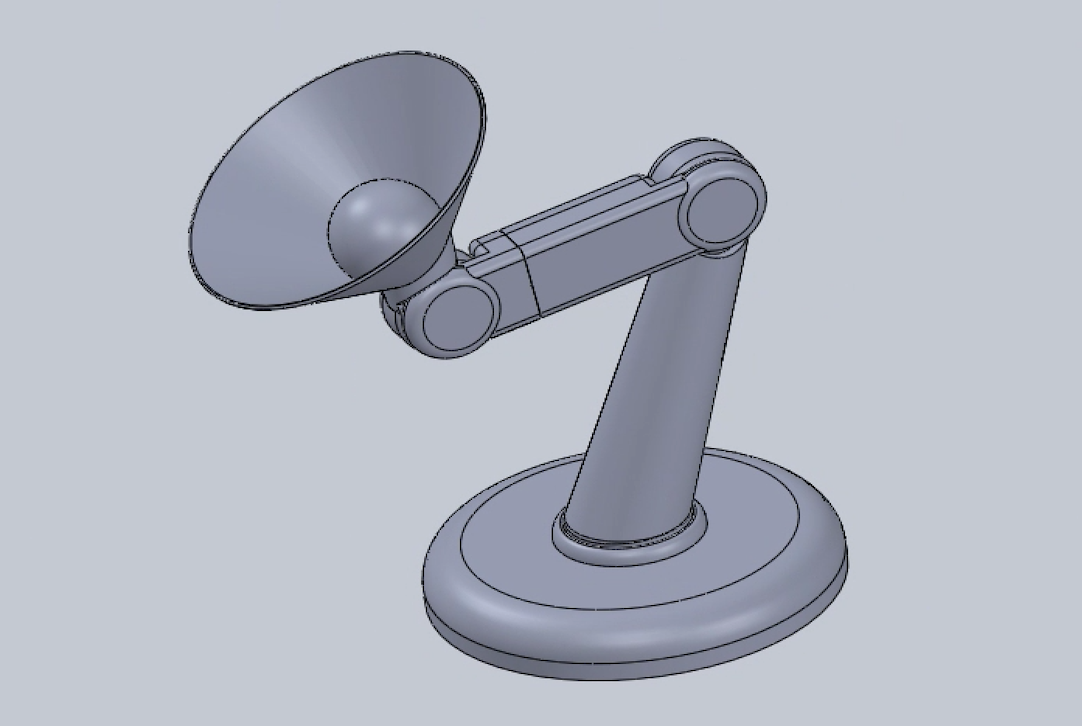
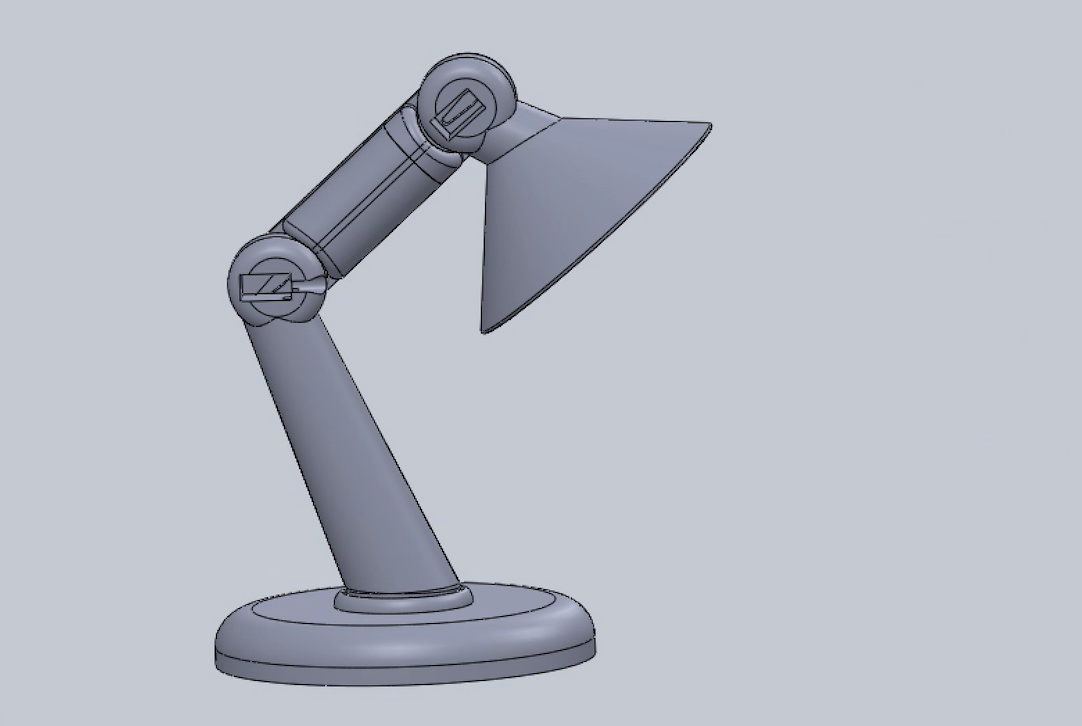
CompletedRobot Lamp v1
A 4 degrees of freedom robotic lamp that interacts with users using computer vision and machine learning and “expresses” itself using principles of human robot interaction.
Shelved
Thread
An iOS application written in Python that allows users to leave a digital “thread” when travelling using GPS data and record visual landmarks using photos to document the route and get accurate directions back to the start location.
Access CodebaseNextUp
A group Spotify queuing and voting app that utilizes the Spotify API and Python in tandem with a Flask backend and a React UI and Axios js to change the order of songs on a playlist in real time.
Made with Diego San Miguel, Mae Hoad, and Sean Prendi
Access Codebase